High Accuracy System for Anatomical Landmarks Localisation (AAL) using Ultrasound
This aim of this project is to investigate the feasibility of automatic measurement and recording of anatomical landmarks representing the skeletal configuration of clients of clinical services such as the Posture and Mobility Special Seating Service. The novel idea which is investigated in this study is to use ultrasound signals to accurately measure anatomical landmarks. These landmarks include vertebra prominens, the dimples of the posterior superior iliac spines and the sacrum point (see Figure 1). With further investigation, techniques are being developed to measure the orientation of the legs, and further improve the reliability of the features identified on the back and pelvis. These skeletal landmarks can be also used to calculate clinical measurements such as pelvic obliquity/tilt/rotation, leg abduction/adduction, severity of spinal curvature and position of the head and centre of gravity.
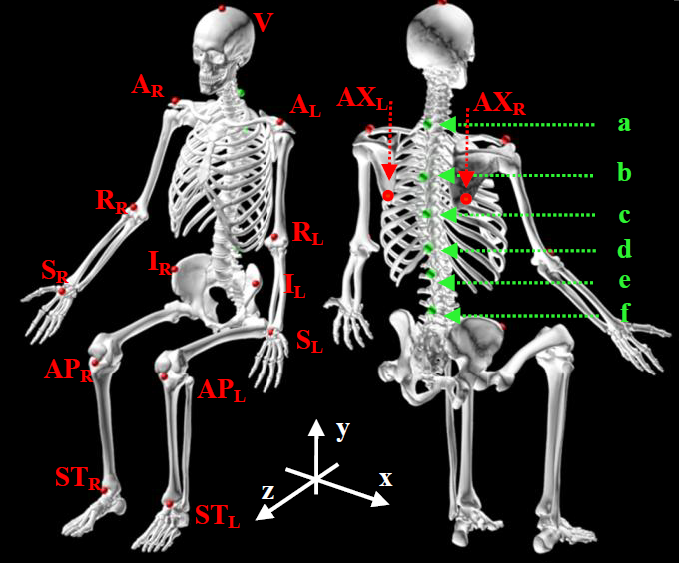
Figure 1. Anatomical landmarks on a human body measured during postural assessment
A system for accurate anatomical landmarks localisation uses a reference frame of four ultrasound sources as transmitters and miniature microphones as receivers that are embedded in the glove worn by a clinician. The transmitters emit pulses in the 30-40 kHz band. A central processing unit, from the known positions of the transmitters and the time of flight of the ultrasound signals until they reach the microphones computes the positions of the microphones, identifying and discarding possible false signals due to echoes and environmental noise. Once the microphones are localised, the position of the anatomical landmark is calculated.
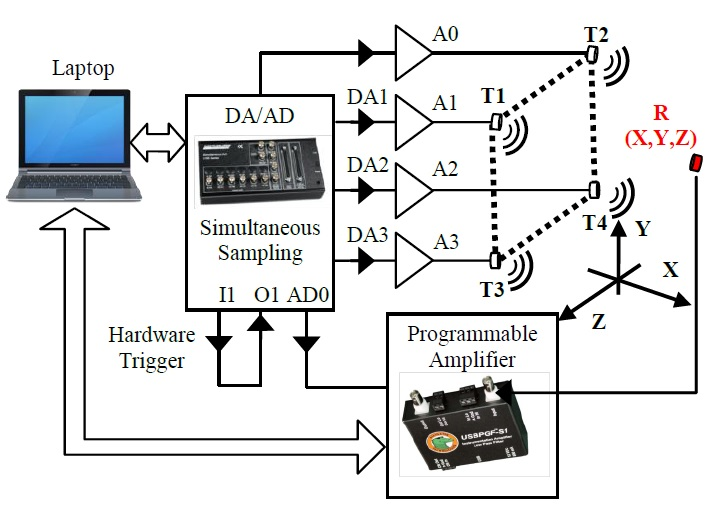
Figure 2. The measurement system for ultrasound localization of anatomical landmarks. Positions of anatomical landmarks, indicated by the receiver R(x,y,z).
Fig. 3 shows setting up the experimental arrangement with 4 transmitters (T0, T1, T2, T3) placed at the vertexes of the square reference frame with known coordinates. Two arrangements of the transmitters have been considered, first with the reference square side of 30 cm and second, with the square side of 50 cm.

Figure 3. Setting up the experiment.
Fig.4 shows the train of acoustic burst signals captured by the receiver. The signal contains a number of reflections due to a sound wave bouncing between the receivers and transmitters platforms. It can also be noted a small, low pass component of the signal most probably induced by the power supply. The same set of signals captured by the receiver after the foam tiles were installed on the receivers’ plane. Most of the reflections were eliminated and the low pass component of the signal was filtered out. A time listening window for each train of burst signals of 30 ms was chosen. It can be seen that the characteristics of the signal captured by the receiver changes both in terms of its envelope and duration.
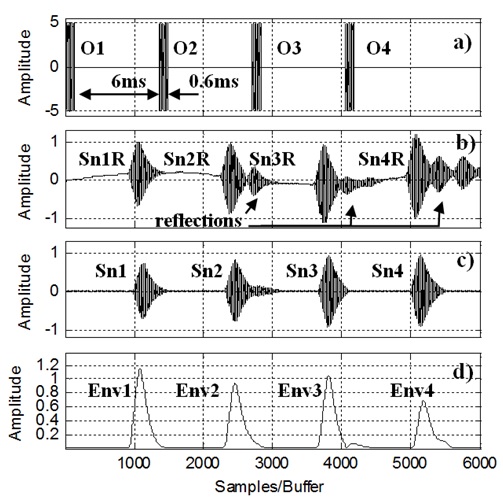
Fig. 4. a) Sequence of four ultrasound signals driving the transmitters, Each ultrasound burst contains approximately 20 sine-wave cycles of 32.8 kHz frequency,
b) Train of ultrasound burst signals captured by the receiver containing unwanted reflections (no foam tiles were used),
c) Train of ultrasound burst signals captured by the receiver and low pass filtered (the foam tiles were placed).
d) Signals envelope using Hilbert Transformation. The distance between the transmitter’s and the receivers’ reference planes was 1.3 m. The transmitters were placed at the vertexes of a square with 30 cm
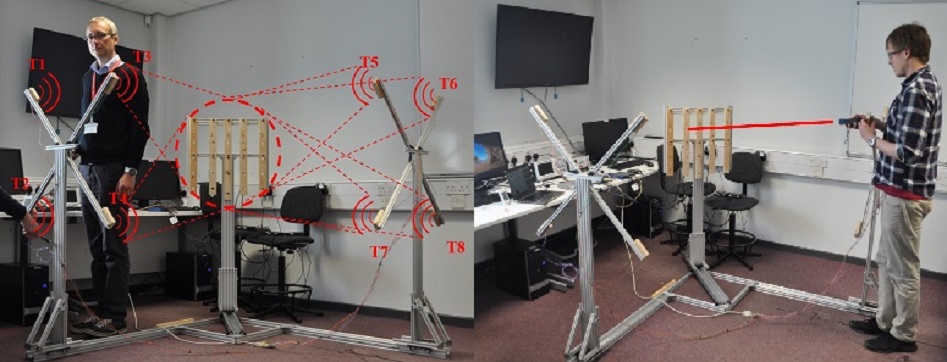
Figure 5. New experimental setup, a) testing the effect of human body blocking the signals, b) distance measurement using laser.
References:
- S. Haigh, J. Kulon, A. Partlow, and C. Gibson, ‘Comparison of Objectives in Multiobjective Optimization of Ultrasonic Positioning Anchor Placement’, IEEE Trans. Instrum. Meas., vol. 71, pp. 1–12, Nov. 2022, doi: 10.1109/TIM.2022.3189729
- S. Haigh, J. Kulon, A. Partlow, P. Rogers, and C. Gibson, ‘Improved Obstacle Mitigation and Localization Accuracy in Narrowband Ultrasonic Localization Systems Using RoBCUL Algorithm’, IEEE Trans. Instrum. Meas., vol. 69, no. 5, pp. 2315–2324, May 2020, doi: 10.1109/TIM.2019.2963553.
- S. Haigh, J. Kulon, A. Partlow, P. Rogers, and C. Gibson, ‘Mitigating the Effect of Obstacles in Narrowband Ultrasonic Localization Systems’, in 2019 IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Auckland, New Zealand: IEEE, May 2019, pp. 1–5. doi: 10.1109/I2MTC.2019.8827132.
- S. Haigh, J. Kulon, A. Partlow, P. Rogers, and C. Gibson, ‘A Robust Algorithm for Classification and Rejection of NLOS Signals in Narrowband Ultrasonic Localization Systems’, IEEE Trans. Instrum. Meas., vol. 68, no. 3, pp. 646–655, Mar. 2019, doi: 10.1109/TIM.2018.2853878.
- J. Kulon, S. Haigh, A. Partlow, P. Rogers, and C. Gibson, ‘A Novel Device For 3d Anatomical Landmarks Localisation’, presented at the All-Wales Medical Physics and Clinical Engineering Summer Meeting, Mercure Cardiff Holland House Hotel, Cardiff, Jun. 2018. [Online]. Available: https://www.eventbrite.co.uk/e/all-wales-medical-physics-and-clinical-engineering-summer-meeting-tickets-43842684650#
- J. Kulon, M. Voysey, A. Partlow, P. Rogers, and C. Gibson, ‘Development of a system for anatomical landmarks localization using ultrasonic signals’, in 2016 IEEE International Symposium on Medical Measurements and Applications (MeMeA), Benevento, Italy: IEEE, May 2016, pp. 1–6. doi: 10.1109/MeMeA.2016.7533764.